
Entraînement d'un télescope par moteur pas-à-pas
(Mis à jour: 5 juillet 2003)
Par: Alphonse Tardif
Le circuit décrit ci-dessous a été publié dans la revue Sky & Telescope dans
le numéro de mai 1989. Il permet d'obtenir les fonctions de guidage,
corrections fines et pointage avec un moteur pas-à-pas et quatre
circuits intégrés seulement.
- Pourquoi trois vitesses?
Tout d'abord, pour suivre les étoiles dans le ciel, un entraînement de
télescope doit fournir la vitesse
de base qui est environ 15,041 secondes d'arc par seconde. Ce mouvement fait
tourner l'axe polaire
vers l'ouest à la vitesse requise pour compenser la rotation de la Terre
vers l'est. Si on veut s'en tenir
à cette seule vitesse, un simple moteur synchrone fonctionnant sur 110
volts est encore le moyen le
plus simple de l'obtenir.
Quand un télescope est utilisé pour l'astrophotographie, il faut de temps en
temps effectuer des
corrections fines à la vitesse de guidage pour compenser les erreurs
produites par les engrenages,
un alignement imparfait sur le pôle, la réfraction atmosphérique et les
flexions dans la monture du
télescope. Pour un télescope de moyenne taille à longue focale, on estime
qu'une marge de
correction de ±10% à la vitesse de guidage est souhaitable.
Pour ce qui est de la fonction de pointage, elle permet, par exemple, de
centrer avec les moteurs une
étoile guide dans un réticule ou de placer un objet à photographier dans le
champ de la caméra ou
encore de centrer un objet dans un oculaire. Une vitesse de 120 secondes
d'arc par seconde est
considérée comme satisfaisante.
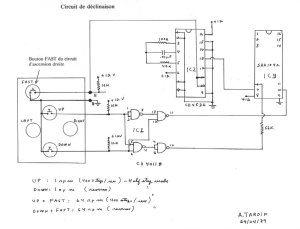
- Fonctionnement du circuit
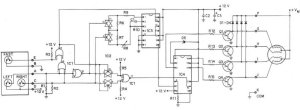
Le circuit est construit autour de la puce Motorola SAA1042. Ce circuit
intégré est conçu d'abord
pour les moteurs pas-à-pas à deux phases mais on peut l'utiliser aussi pour
un moteur à quatre
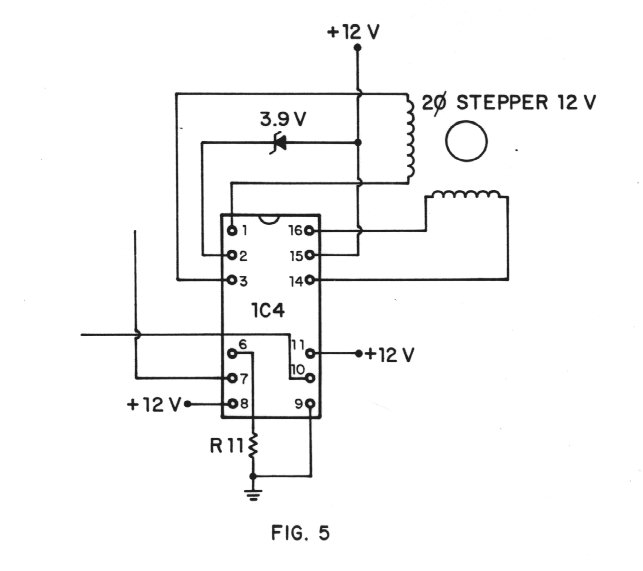
phases aussi bien dans le mode plein-pas que demi-pas. Dans mon circuit la
puce SAA1042
entraîne un moteur à quatre phases en mode demi-pas pour plus de douceur de
fonctionnement.
Seul les signaux logiques de la puce sont utilisés pour commander des
transistors de puissance.
Etant donné que le SAA1042 peut fournir une courant de 500 mA par phase,
cela permet d'utiliser
des moteurs assez robustes.
Avec un moteur typique de 1,8° par pas, on obtient 400 demi-pas par
révolution. Dans ces conditions
le circuit génère une vitesse de base de 4 rpm. On peut varier R8 pour
ajuster cette vitesse à la
vitesse sidérale. Les boutons de la raquette fonctionnent comme dans le
tableau ci-dessous:
| Les boutons de la raquette: Left, Right |
| Bouton pressé |
Rotation du moteur |
| Aucun |
4,00 r.p.m. horaire |
| LEFT seulement |
3,54 r.p.m. horaire |
| RIGHT seulement |
4,57 r.p.m. horaire |
| LEFT + FAST |
28,3 r.p.m. anti-horaire |
| RIGHT + FAST |
36,6 r.p.m. horaire |
A noter que la différence des vitesses pour le pointage
est voulue pour tenir compte du mouvement du ciel. |
La puce IC3 comporte un oscillateur intégré et un diviseur de fréquence.
Elle sert à générer la
fréquence qui commande IC4. La fréquence de l'oscillateur est de 218,4 kHz
et elle est déterminée
par la valeur de C1 ainsi que par la chaîne de résistance R6 à R9. La
fréquence de l'oscillateur est
divisée par 8,192 pour générer la vitesse de guidage et par 1024 pour la
vitesse de pointage. IC1 et
IC2 assurent les fonctions logiques. Veuillez noter que ces puces sont
représentées chacune par
quatre symboles logiques. Il ne faut pas oublier pour ces deux puces de
relier la patte 7 à la terre et la
patte 14 à V+.
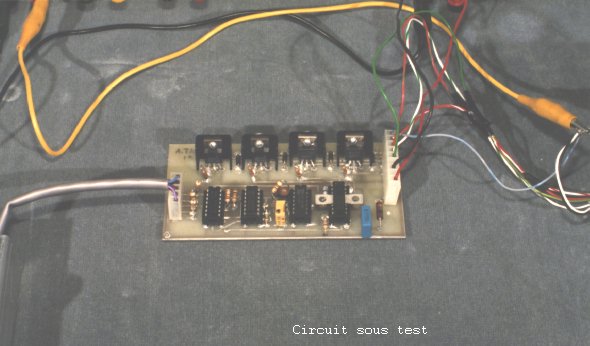
- Dissipation de chaleur
Les transistors de puissance TIP 122 doivent être munis de drain de chaleur
TO-220 pour assurer
leur refroidissement. Avec des transistors plus puissants, il faudrait
untiliser une drain de chaleur de
plus grande capacité avec des isolateurs en mica pour chaque transistor. Il
est important de garder
les transistors proche du circuit pour éviter les signaux parasites produits
par de longs fils.
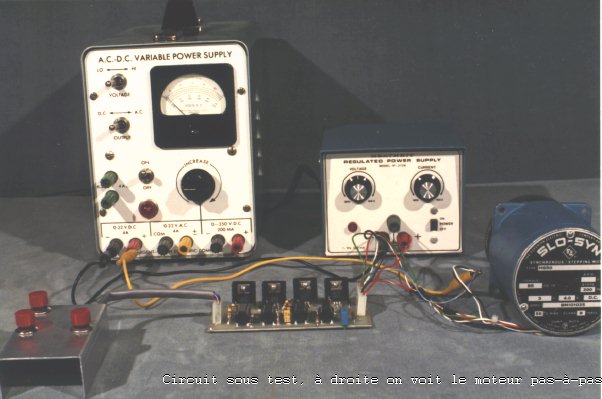
- Alimentation
Le circuit fonctionne sous une tension de 12 volts. Par contre beaucoup de
moteurs pas-à-pas
exigent une tension VM de 3 à 5 volts. Avec une seule source d'alimentation
12 V, il faut ajouter une
résistance de grande puissance pour faire chuter la tension de 12 V à 5 V.
Il est donc préférable de prévoir une alimentation séparée pour le circuit
et pour le moteur.
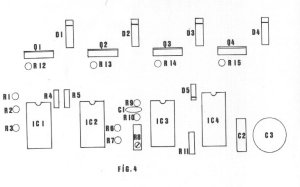
- Circuit imprimé
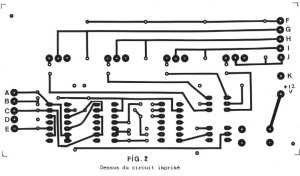

La complexité du circuit exige un circuit imprimé à deux faces. Le dessin
vous est fourni. Pour le
réaliser avec des moyens artisanaux, on peut procéder comme suit. D'abord on
se procure une
plaquette comportant du cuivre des deux côtés. On superpose le plan pour le
dessus du circuit sur la
plaquette et on marque l'emplacement des trous avec un poinçon. On perce les
trous avec une
mèche #60 (0,040"). On dessine chaque côté du circuit avec un stylo vernis
disponible chez Radio Shack. Ensuite on plonge le circuit dans une
solution de chlorure ferrique
pour enlever le cuivre non
vernis. Finalement on enlève le vernis avec un solvant ou avec une gomme à
effacer. La plupart des
produits requis pour fabriquer le circuit sont disponibles dans les magasins
Radio Shack.
Alphonse Tardif
Faites-nous part de vos commentaires.
Copyright ©;
Il vous est cependant permis d'inclure dans vos propres documents des liens vers ceux-ci.
Les liens et documents présentés sur nos pages sont faits avec autorisation.
|
